项目简介:
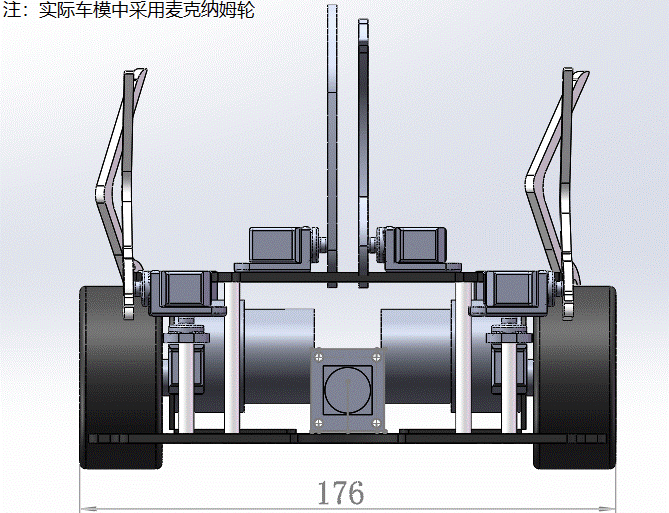
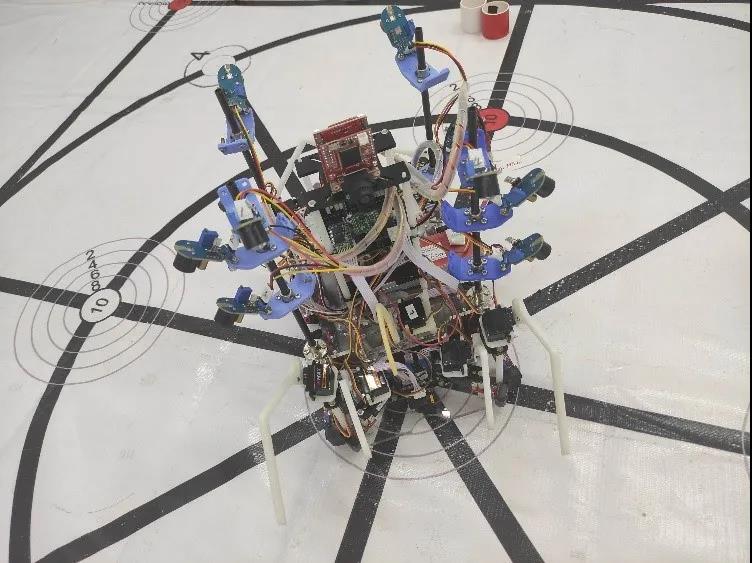
该项目的捡球机器人能通过视觉SLAM算法研究,解决小车在未知环境运动时的定位和地图构建问题,并且规划出最优路径;通过摄像头识别球,并自主完成捡球与储球,当存储的球达到一定数量后回到指定位置放置球。此外,它具备自主避障功能,防止在移动过程中撞到物体或人等障碍物,从而实现捡球的功能。
目前正对项目具体的科技类因素通过综合考虑性能、成本、市场等因素后,选定一种科学合理的整体系统架构方案以及相应更全面的营销与生产方案,让技术与产品接轨。
项目负责人:
钟倩雯 自动化学院
项目成员:
陈佳枝、冯诗婷、姚林欣、许铭杰、陈祖城、卢钟坚
项目指导老师:
袁飞、张红强
奖项:
1、2020中国机器人大赛——双足人形项目一等奖
2、2020广东省工科大学生实验综合技能竞赛二等奖
3、2019中国机器人大赛——光电车型搬运项目冠军
4、2019中国机器人大赛——摄像头车型搬运项目二等奖
5、2019广东省工科大学生实验综合技能竞赛——机器人投篮项目三等奖
6、2019全国大学生电子设计竞赛广东赛区获省三等奖